

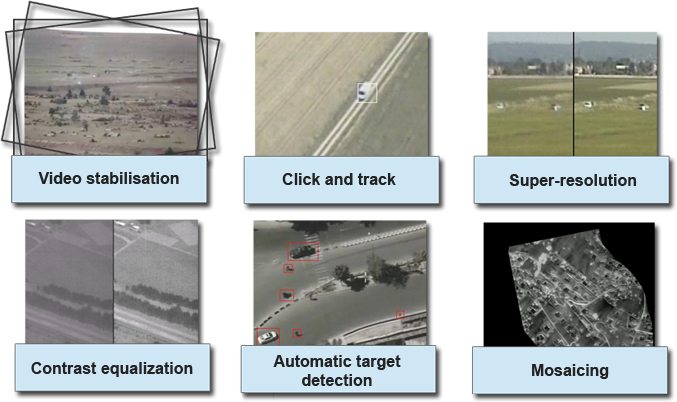
![]() PIXUAV is a software library dedicated to drones. It offers video stabilization, super-resolution, images enhancing and moving object follow.
PIXUAV is a software library dedicated to drones. It offers video stabilization, super-resolution, images enhancing and moving object follow.
Coupled with a PIXBOARD (embarked in the drone or in ground station), it allow to distribute the calculation charge between the host computer and the board, allowing this way to free CPU power to your applications.
Available on Windows and Linux (32 and 64 bits), it offers a simple but complete API and is interfacable with usual development tools (VC++, Borland, C, GCC, MingW, …).
PixUAV demonstration
PIXUAV – Functions preview
PIXUAV – “Mosaic” demo